
EEZZYbotARM(Parte1)
Da rienda suelta a tus habilidades manuales, creativas e informáticas con este sencillo experimento.

Contenido
El blog se dividirá en dos partes: en este primer blog veremos la impresión y ensamblado del brazo, mientras que en una segunda parte mostraremos la programación y acabado final.
Descripción
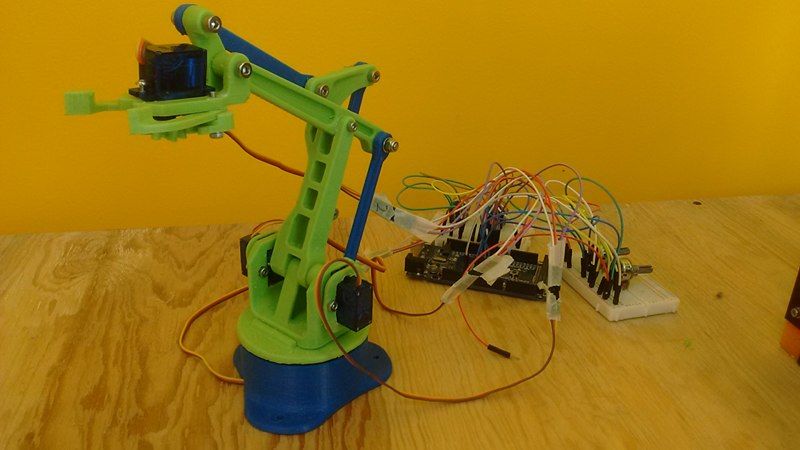
EEZYbotARM es, como su nombre lo dice, un brazo mecánico sencillo muy fácil de realizar, generalmente compuesto por piezas impresas en 3D, unos cuantos tornillos , tuercas y un sencillo circuito electrónico. Además, debido a su versatilidad algunos de sus componentes pueden ser modificados o sustituidos de tal manera que se ajusten al presupuesto de todo aquel que se anime a crearlo.

Materiales
-20 piezas de plástico PLA o ABS impresas en 3D(puedes encontrar los archivos STL en el link al final del blog).
-3 micro servo motores.
-7 tuercas M4 de seguridad.
-15 rondanas M4.
-7 tuercas M3.
-1 tornillo M3X30.
-2 rondanas M3.
-6 tornillos M3X12.
-2 tornillos M3X20.
-5 tornillos M4X20.
-1 perno M3X26.

Visualizar antes de actuar
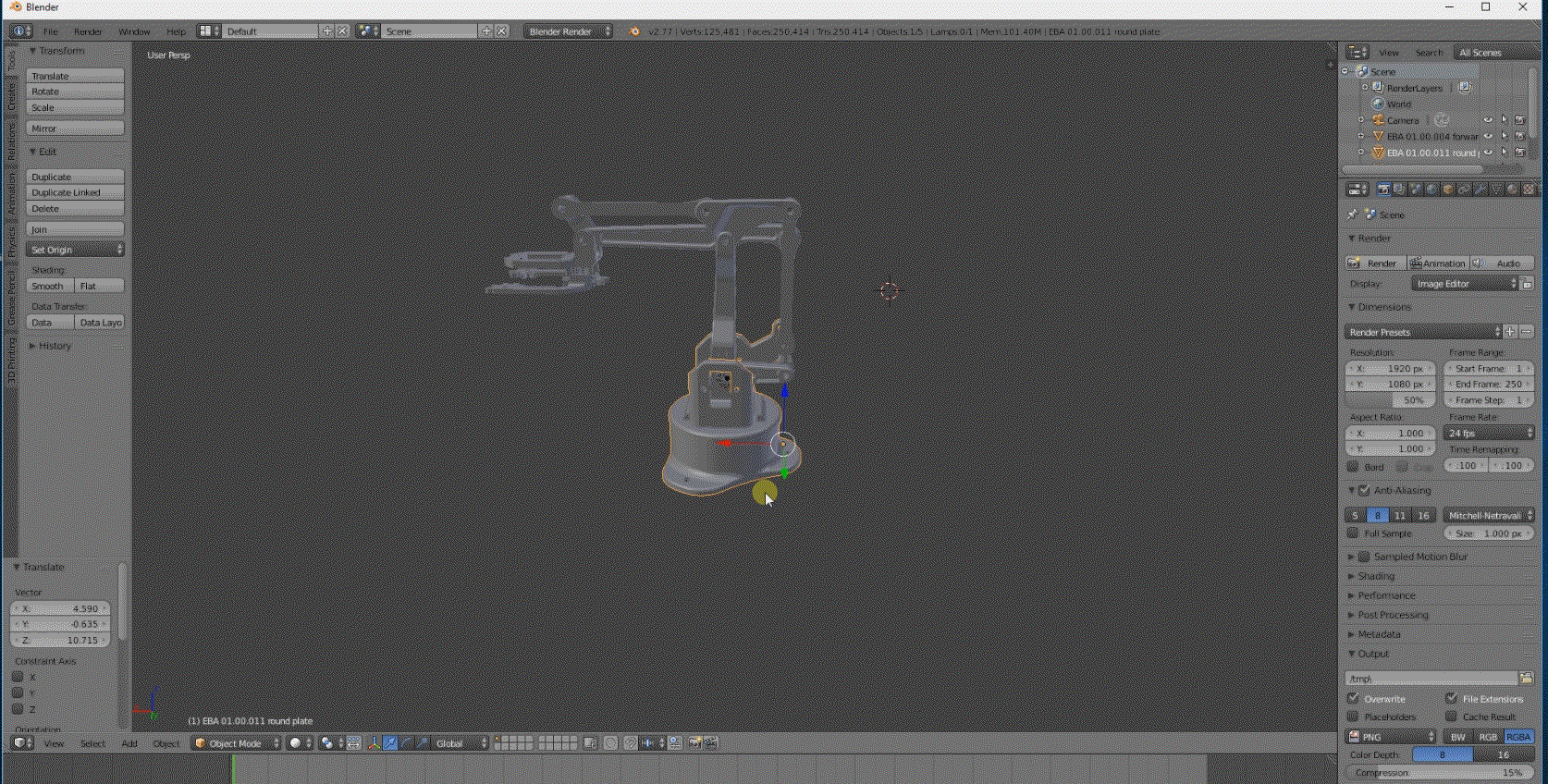
Como en todo, es importante planificar lo que vamos a hacer, en este caso con fines ilustrativos hemos simulado el ensamblado de las piezas 3d en Blender. Da click en el botón de abajo para ver el video.
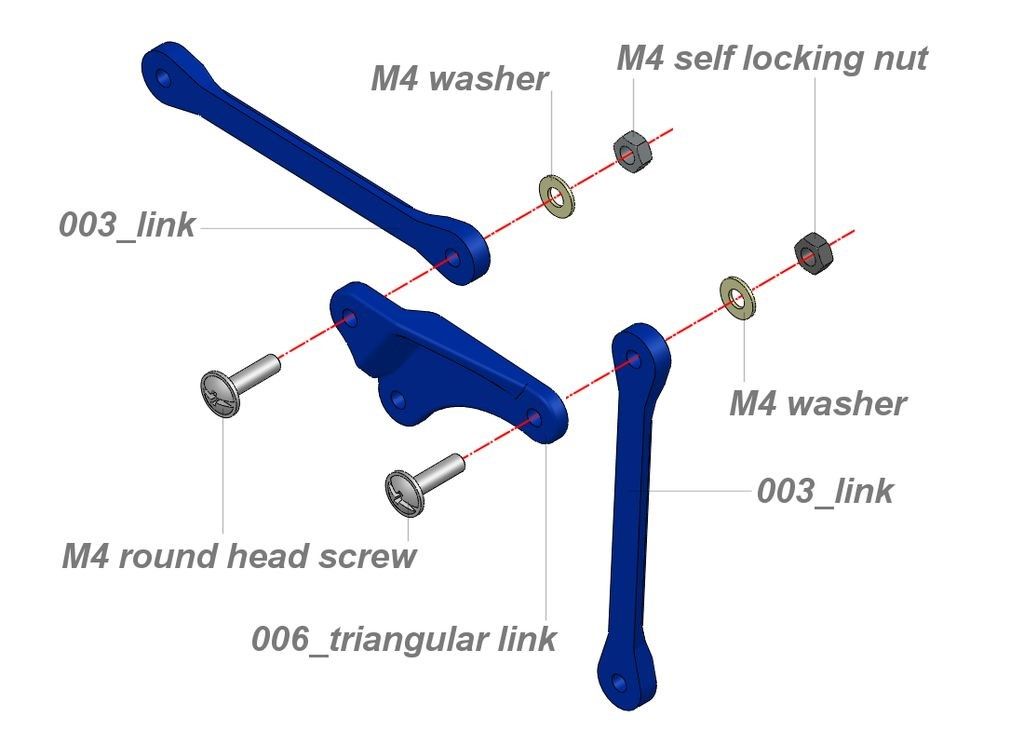
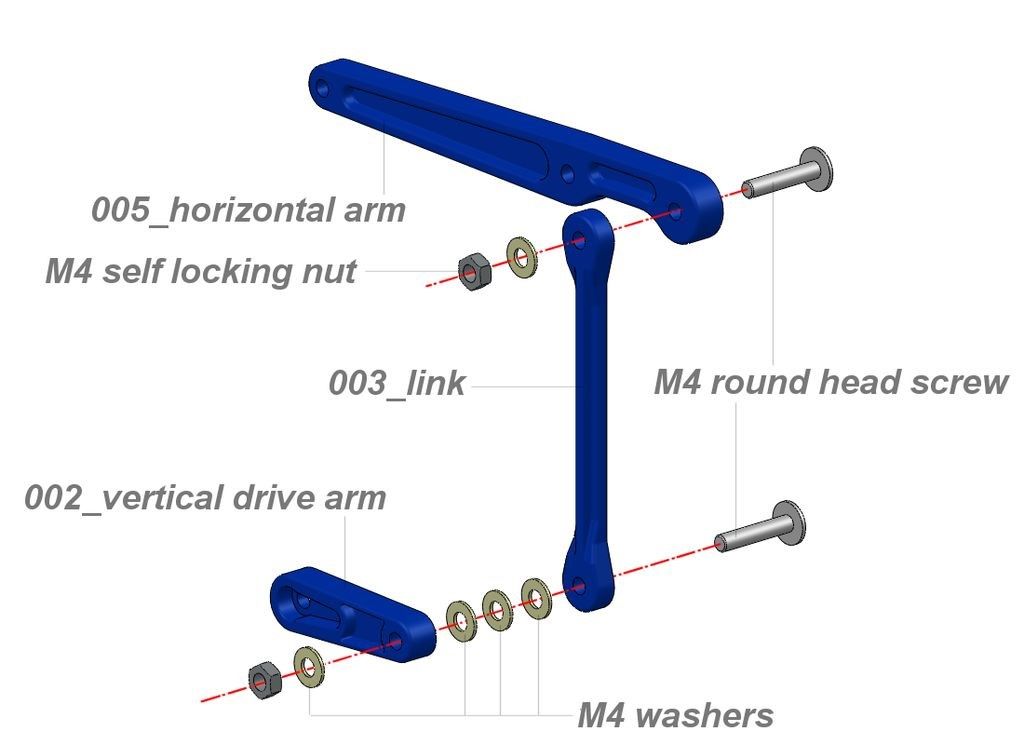
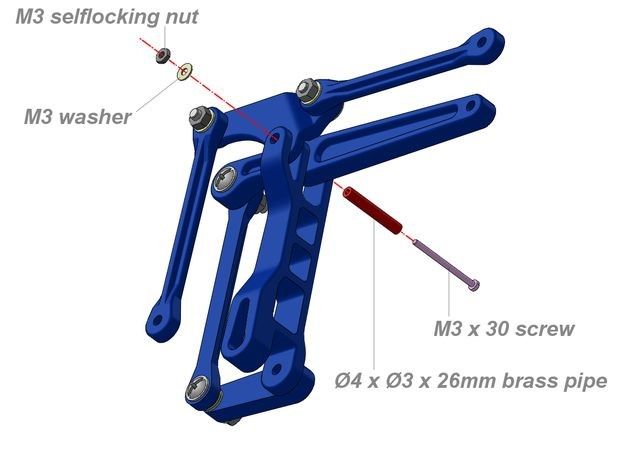
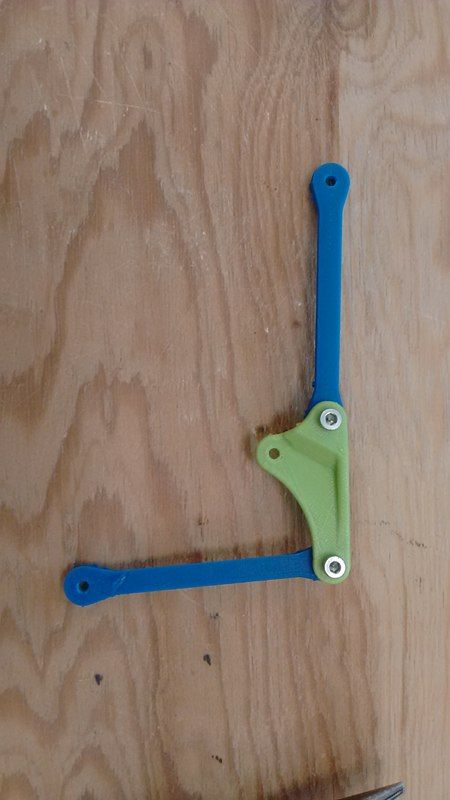
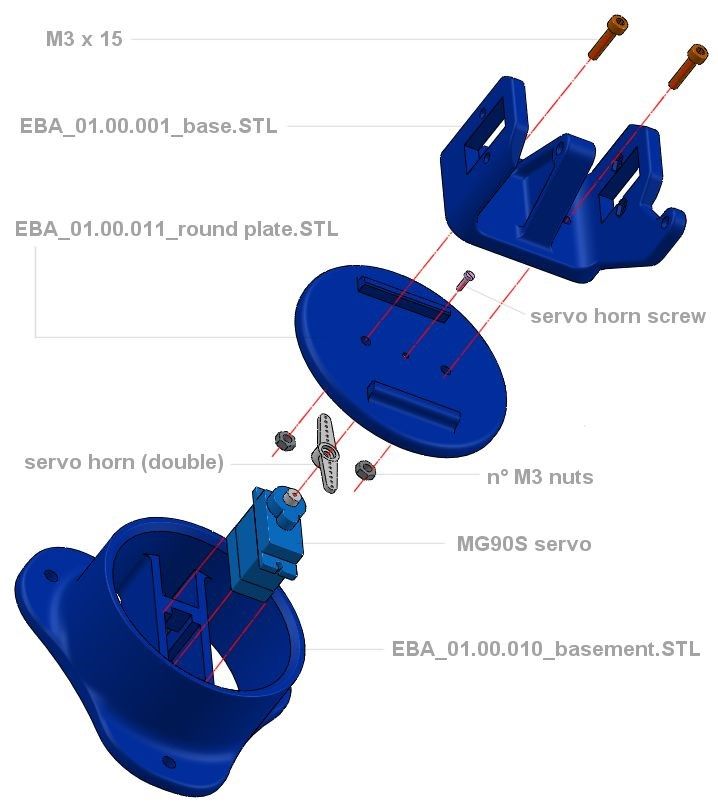
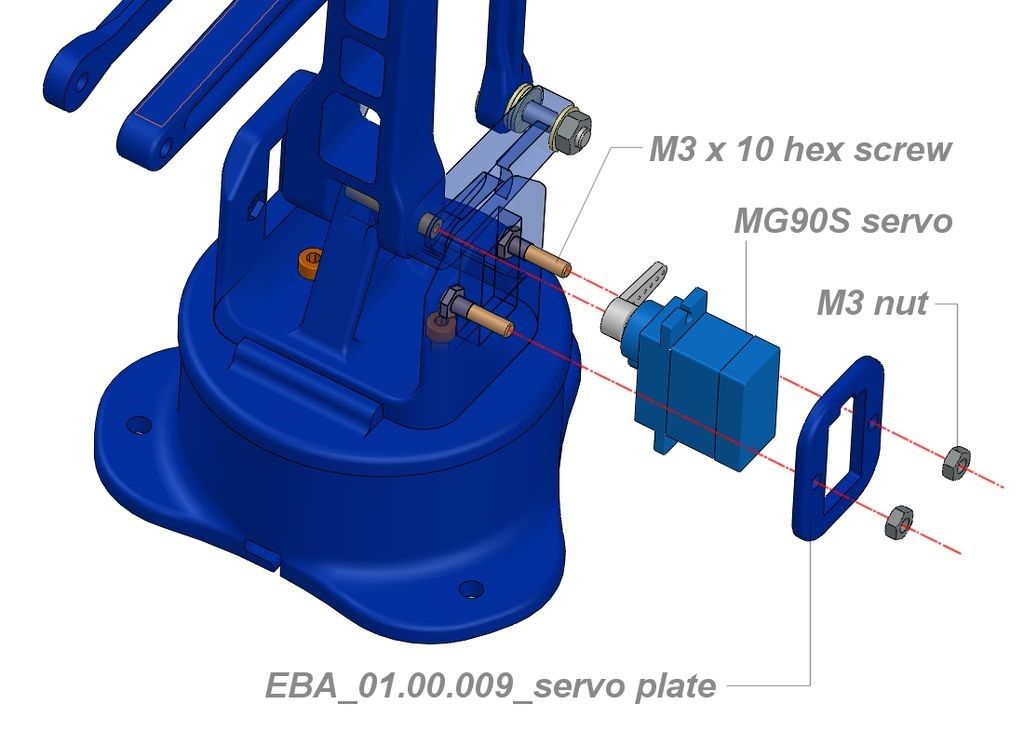
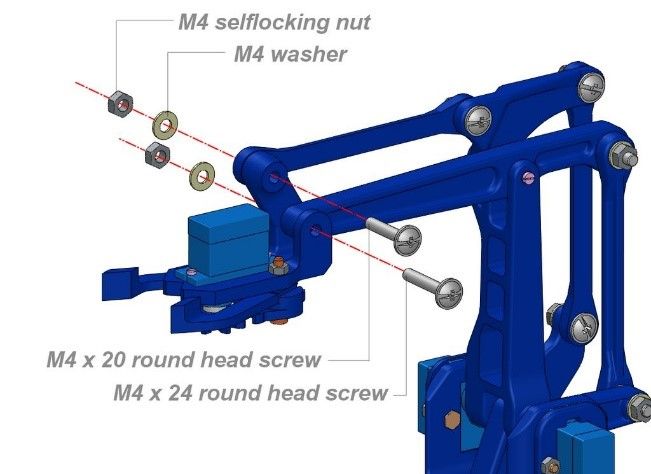
Ensamblado
Las siguientes imágenes muestran el proceso de ensamblado parte por parte, dicho proceso debe llevarse con cuidado para no dañar ni romper ninguna pieza.







Conclusión
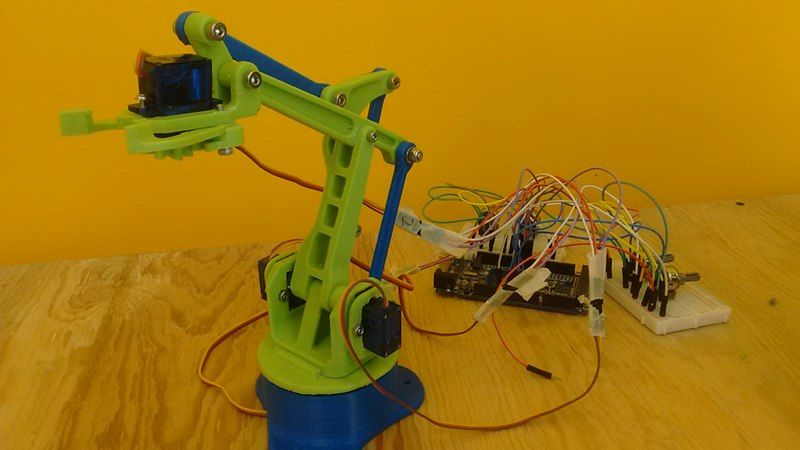
Con esto hemos finalizado el blog de ensamblado. En breve se subirá la secuela que mostrará la programación y el EEZYbotARM en funcionamiento hecho en Makerlab. Sin duda alguna este “experimento” nos muestra la versatilidad de la maravillosa impresión 3D que además es muy accesible y todo Maker con o sin experiencia puede disfrutar de realizarlo en sus tiempos libres.
Fuente, agradecimientos y créditos:
http://www.instructables.com/id/EEZYbotARM/